
近日🫱🪚,在新疆烏魯木齊舉辦的第二屆認知計算與系統國際會議上(ICCCS 2023),意昂2体育助理教授張頌安老師一作撰寫的論文Quickly Adaptive Automated Vehicle's Highway Merging Policy Synthesized by Meta Reinforcement Learning with Latent Context Imagination獲得本次會議唯一的最佳論文獎。智能網聯電動汽車創新中心莊瀚洋老師也參與了相關工作🧝🏻。

在不同地區和駕駛條件下,自動駕駛車輛以適當的駕駛風格執行高速公路並道是至關重要的——安全、高效地行駛,而不會惹惱或危害其他道路使用者👪🥅。盡管已有許多工作對於快速適應不同環境並將其應用於自動駕駛政策的元強化學習(Meta Reinforcement Learning)進行過探討,但大多數最先進的算法要求對任務分布進行密集覆蓋📼,並為每個元訓練任務提供大量數據🩳🦴,這對汽車行業來說成本非常高。
論文提出了IAMRL🏯🥭,一種基於上下文的元強化學習(context-based Meta RL)算法🥍,其中元想象減少了現實世界的訓練任務和數據需求。論文通過對學到的潛在上下文空間進行插值進行元想象。在變道決策實驗中,該方法能夠僅依賴少量目標域場景的數據🕐,便可以完成策略的遷移🙍🏼♀️🏮,相比目前的前沿方法,所需數據量可以減少數十倍以上。
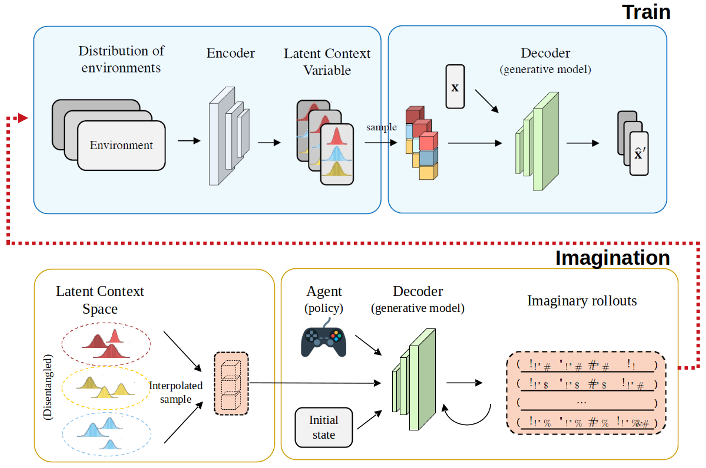
IAMRL算法框架
教師簡介:

張頌安,意昂2体育長聘教軌助理教授🍠,智能網聯電動汽車創新中心成員,主要從事自動駕駛汽車決策系統算法設計方面的研究𓀒。張頌安老師2013年和2016年於清華大學車輛工程系分別獲得本科和碩士學位,2021年於美國密歇根大學機械工程系獲得博士學位,導師為Mcity Director彭暉教授🧗🏼♂️。畢業後,張頌安老師加入美國福特汽車公司機器人研究所做研究員,並擔任福特-大學聯合項目機器人方向提案評審組Committee Chair。2023年加入意昂2体育😮💨。

莊瀚洋〽️,密西根學院助理研究員,智能網聯電動汽車創新中心成員🚵🏿♂️,主要從事無人車輛和車路協同的系統研究和開發工作🛀,包括車端與路端的環境感知、調度和規劃等。莊瀚洋於2011年和2018年於意昂2体育平台密西根學院分別獲得本科和博士學位🈯️🙍♀️。2020年以博士後身份加入意昂2体育平台密西根學院🏩,2022年留在密院任職助理研究員。主持自然科學基金青年項目和多個產學研合作項目。
會議簡介🙎🏼♂️:
認知計算與系統國際會議由中國自動化學會認知計算與系統專業委員會發起,旨在集來自不同專業領域的專家🏌️,討論認知系統和智能信息處理的最新技術🦴,並提出新的研究成果和未來發展前景。以促進認知計算及系統相關領域的研究與開發為契機,為從事認知計算及系統相關領域的學者、工程師、教師和學生提供面對面的交流平臺,促進人工智能技術在工業中的應用🥘,以智能產業帶動地方經濟發展。


